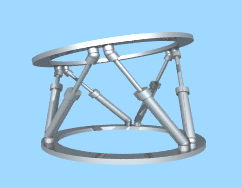
Hexapod Fixators are a fascinating application of the hexapod mechanism in orthopaedics, both human and animal. The aim of this project is to develop an open-source software system for orthopaedic use with hexapod fixators. However the algorithms are generic, and the project also serves as a tutorial on the hexapod mechanism and coordinate transformations.
The software is implemented here as a Web application with 7 forms: Ring Parameters,Strut Parameters,Frame Parameters,Strut Lengths,X-Ray Parameters,Deformity Parameters, and Deformity Correction. Move through the forms in this order, providing the requested information before moving on to the next. The purpose of each form should be clear from the descriptive text. Form data is stored in xml files on the server for later retrieval. Example data can be loaded into each form to aid understanding. The Software section contains descriptions of the algorithms and the software implementation, with the current open source release.